
In the framework of the SESAR Horizon 2020 4DSkyways project (PJ.18W2 – Solution 53), European research partners with support from the Maastricht UAC are investigating how supervised machine learning can improve the generation of conflict-free trajectories. In this article, Raphaël Christien and Karim Zeghal, researchers from EUROCONTROL, 4DSkyways coordinator, provide a brief overview of their initial investigations.
The motivation for this study[1] is to provide controller support for separation between aircraft in enroute airspace, as a way to reduce workload and safely increase capacity. The objective is to generate trajectory proposals to resolve conflicts based on current practices (imitation learning) as a way to get controller acceptability. The focus is on machine learning aspects, not on human / machine interaction.
The case study we address is, given a traffic situation and using historical data, to predict conflict free trajectories with a 5 minutes look-ahead. The historical data is used to learn a mapping between the traffic situation to the future conflict free positions (supervised learning phase). This would appear as “mimicking” controller resolution patterns from similar traffic situations.
After a detailed review of the state of the art, we have decided to select and explore two distinct approaches. The first one, the “relative” model (figure 1), takes a pilot point of view with a flight-centred representation of the surrounding traffic, represented by an image going into a convolutional neural network. The second one, the “absolute” model (figure 2) takes a controller point of view with a sector-based representation of the traffic, represented by a list of flight parameters going into a feed forward neural network.
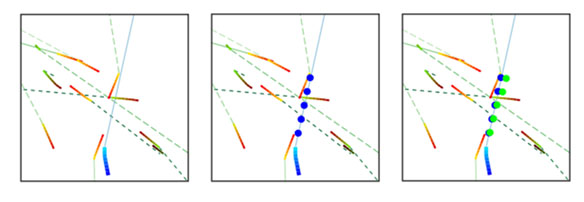
Figure 1: relative model, subject aircraft currently heading up and exit point slightly heading right (left, in blue: past and current positions; middle, blue dots: true future positions; right, green dots: predicted future position) and surrounding traffic (altitude colour coded).

Figure 2: controller / absolute model, subject aircraft currently heading East (left, in blue: current positions; middle, blue dots: true future positions; right, green dots: predicted future position) and surrounding traffic (altitude colour coded).
We used recorded traffic data from 2018 (tracks and flight plans) from Maastricht UAC used to draw a 250k data set, with a focus on Delta sector. Following common practices, the dataset was split in three parts (extracted from different days to avoid data leaks): 80% for training, 10% for validation and 10% for test.
Considering the nature of the traffic, the dataset was unbalanced with 72% of cases with no change for the period considered. This means 72% with nothing to learn but a straight and steady flight progress. According to common practices, we rebalance the dataset by splitting it in two 50% sub-sets: one with no change, the other with a change in vertical and/or horizontal dimension (using change thresholds of 1000ft and 2NM, determined statistically). This split was applied on training, validation and test datasets. This results in a more challenging situation, with more patterns to learn, although not representative of today’s traffic patterns proportions.
The performance of both models is compared to a baseline to ensure a learning has been achieved (figure 3). For the best model (sector based), the median deviations between the prediction and the true future locations are 0.4NM and 23ft “with no change”, and 1.3NM and 500ft “with change”. These results show that relevant information has been extracted and a mapping between inputs and outputs achieved. However, the prediction error remains quite significant compared to separation standards (5NM, 1000ft). Regarding the other model, only slightly better than the baseline, we would have to determine whether this is linked to the flight-centred point-of-view or the machine learning architecture, in particular the input representation.
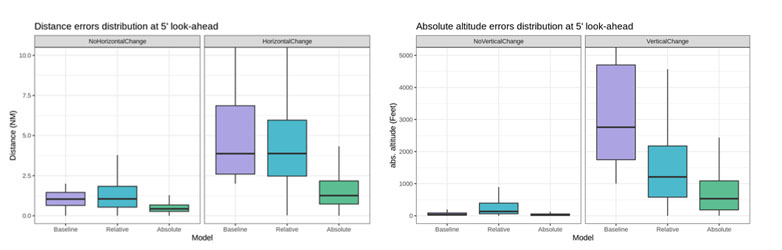
Figure 3: horizontal (left) and vertical (right) error distribution at 5 minutes look-ahead, for “with no change” and “with change” situations, for baseline, relative and absolute models.
Future work will investigate further both models as well as a novel approach relying on attention mechanisms. We will seek to improve the performance also on bad performance cases patterns, and later, adding other information (e.g. military areas, meteo).
EUROCONTROL leads the SESAR/Horizon 2020 4DSkyways project (PJ18W2). Solution 53 aims to validate improvements to the ground trajectory prediction and separation management/ monitoring tools by using aircraft trajectory data, more precise meteo data, improved algorithms and machine learning techniques. The final results of the validation on supervise machine learning are planned for 2022.
More about 4DSkyways
This project has received funding from the SESAR Joint Undertaking under the European Union's Horizon 2020 research and innovation programme under grant agreement No 872320
[1] The study was presented by Integrated Communications Navigation and Surveillance (ICNS) conference in September 2020