ENHANCED DETECT AND AVOID SYSTEMS FOR UNMANNED VEHICLES
This Solution was formerly part of PJ.11-A2-W1
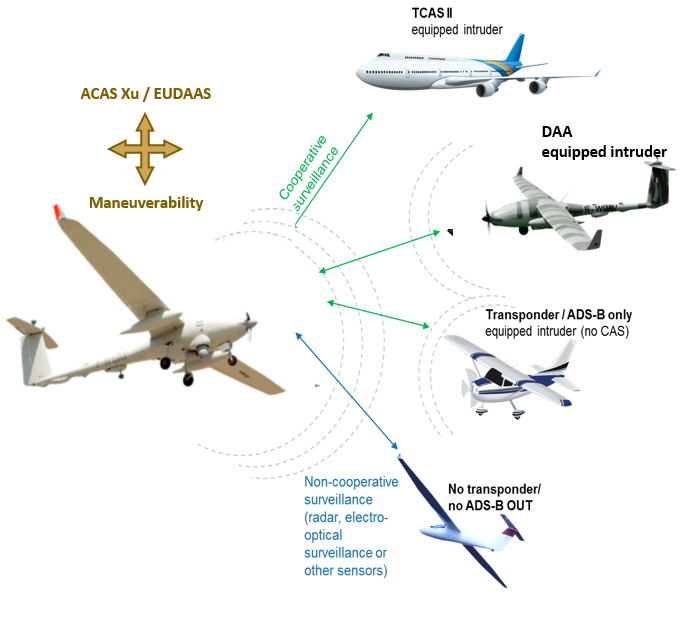
Most airborne collision avoidance systems (ACAS) are designed for commercial aircraft, however the growing number of remotely piloted aerial systems (RPAS) calls for ACAS capabilities between all airspace users. In addition, ACAS relies on Mode C/S interrogations for information when other sources such as ADS-B, electro-optical and infrared sensors are available.
SESAR features these additional surveillance sources as part of the ACAS Xu and the European detect and avoid system (EUDAAS) candidate solutions, both aimed at RPAS users. The research aims to operationally validate a detect and avoid (DAA) system for instrument flight rules (IFR) RPAS consisting of two functions: collision avoidance (CA) and remain well clear (RWC), in order to allow the remote pilot to contribute to safety by preventing collisions, should normal separation provision fail. The RWC function is designed to provide the remote pilot with enhanced situational awareness.
The candidate solution uses advanced mathematical models to optimise resolution advisories in horizontal vertical planes and considers additional factors affecting collision avoidance such as human factors and system latency.
The candidate solution can potentially help the integration of RPAS in the European airspace, and SESAR is also trying to harmonise this activity with similar programmes in other parts of the world including the US. Coordination between standards agencies EUROCAE and RTCA, which will contribute to the global design and standardisation of ACAS Xu and EUDAAS.
BENEFITS
Enhanced safety
Equitable access to airspace